
Merge commit 'dfa32490'
No related branches found
No related tags found
Showing
- moose-examples/docs/source/images/rdes6_multiscale.png 0 additions, 0 deletionsmoose-examples/docs/source/images/rdes6_multiscale.png
- moose-examples/docs/source/images/rdes7_passive.png 0 additions, 0 deletionsmoose-examples/docs/source/images/rdes7_passive.png
- moose-examples/docs/source/images/rdes8_active.png 0 additions, 0 deletionsmoose-examples/docs/source/images/rdes8_active.png
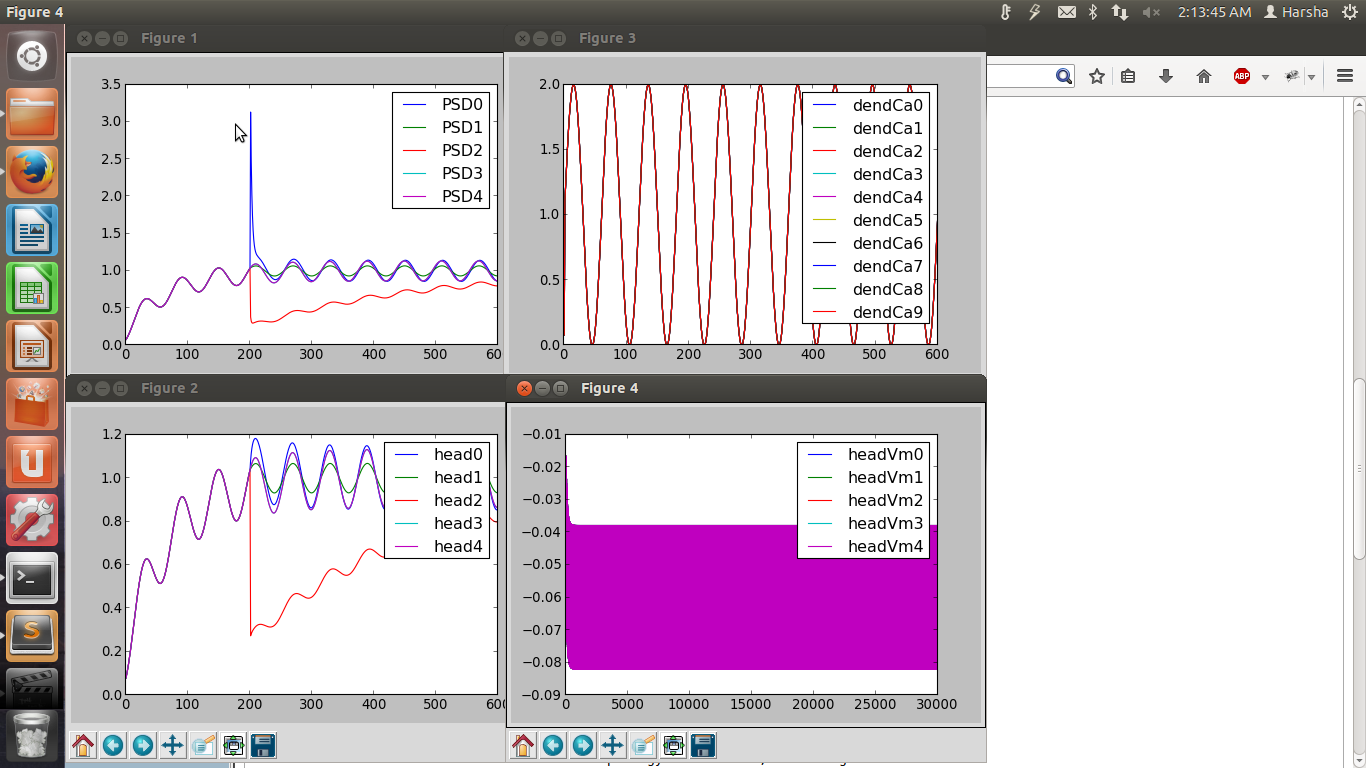
- moose-examples/docs/source/images/rdes9_spiny_active.png 0 additions, 0 deletionsmoose-examples/docs/source/images/rdes9_spiny_active.png
- moose-examples/docs/source/images/reacDiffBranchingNeuron.png 0 additions, 0 deletions...e-examples/docs/source/images/reacDiffBranchingNeuron.png
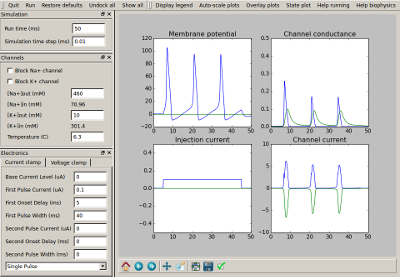
- moose-examples/docs/source/images/squid_demo.png 0 additions, 0 deletionsmoose-examples/docs/source/images/squid_demo.png
- moose-examples/docs/source/images/testWigglySpines3.png 0 additions, 0 deletionsmoose-examples/docs/source/images/testWigglySpines3.png
- moose-examples/docs/source/images/tweakingParameters.png 0 additions, 0 deletionsmoose-examples/docs/source/images/tweakingParameters.png
- moose-examples/docs/source/images/twoCells.png 0 additions, 0 deletionsmoose-examples/docs/source/images/twoCells.png
- moose-examples/docs/source/index.rst 0 additions, 23 deletionsmoose-examples/docs/source/index.rst
- moose-examples/docs/source/install/index.rst~ 0 additions, 207 deletionsmoose-examples/docs/source/install/index.rst~
- moose-examples/docs/source/install/index_install.rst 0 additions, 208 deletionsmoose-examples/docs/source/install/index_install.rst
- moose-examples/docs/source/install/moose_quickstart.rst~ 0 additions, 0 deletionsmoose-examples/docs/source/install/moose_quickstart.rst~
- moose-examples/docs/source/introduction/changes/index.rst 0 additions, 4 deletionsmoose-examples/docs/source/introduction/changes/index.rst
- moose-examples/docs/source/introduction/index_intro.rst 0 additions, 24 deletionsmoose-examples/docs/source/introduction/index_intro.rst
- moose-examples/docs/source/introduction/known_issues/index.rst 0 additions, 9 deletions...-examples/docs/source/introduction/known_issues/index.rst
- moose-examples/docs/source/introduction/release_notes/index.rst 0 additions, 4 deletions...examples/docs/source/introduction/release_notes/index.rst
- moose-examples/docs/source/user/py/cookbook/chem.rst 0 additions, 249 deletionsmoose-examples/docs/source/user/py/cookbook/chem.rst
- moose-examples/docs/source/user/py/cookbook/elec.rst 0 additions, 119 deletionsmoose-examples/docs/source/user/py/cookbook/elec.rst
- moose-examples/docs/source/user/py/cookbook/index_ckbk.rst 0 additions, 14 deletionsmoose-examples/docs/source/user/py/cookbook/index_ckbk.rst
{kind=link}
37.5 KiB
{kind=link}
33.4 KiB
{kind=link}

64.8 KiB
{kind=link}
181 KiB
{kind=link}
19.1 KiB
{kind=link}
53 KiB
{kind=link}
205 KiB
{kind=link}
47.4 KiB
{kind=link}

25.7 KiB
moose-examples/docs/source/index.rst
deleted
100644 → 0